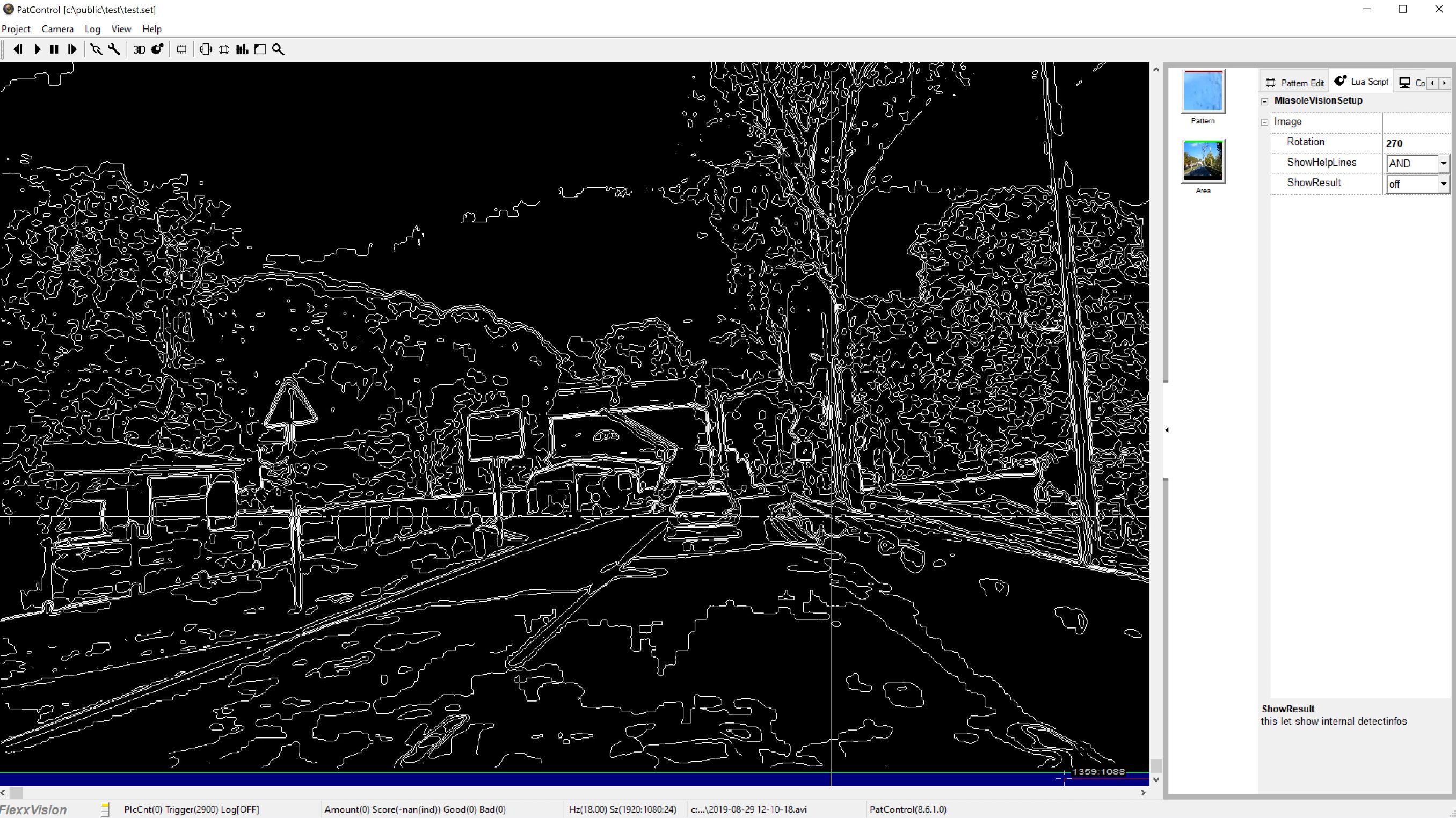
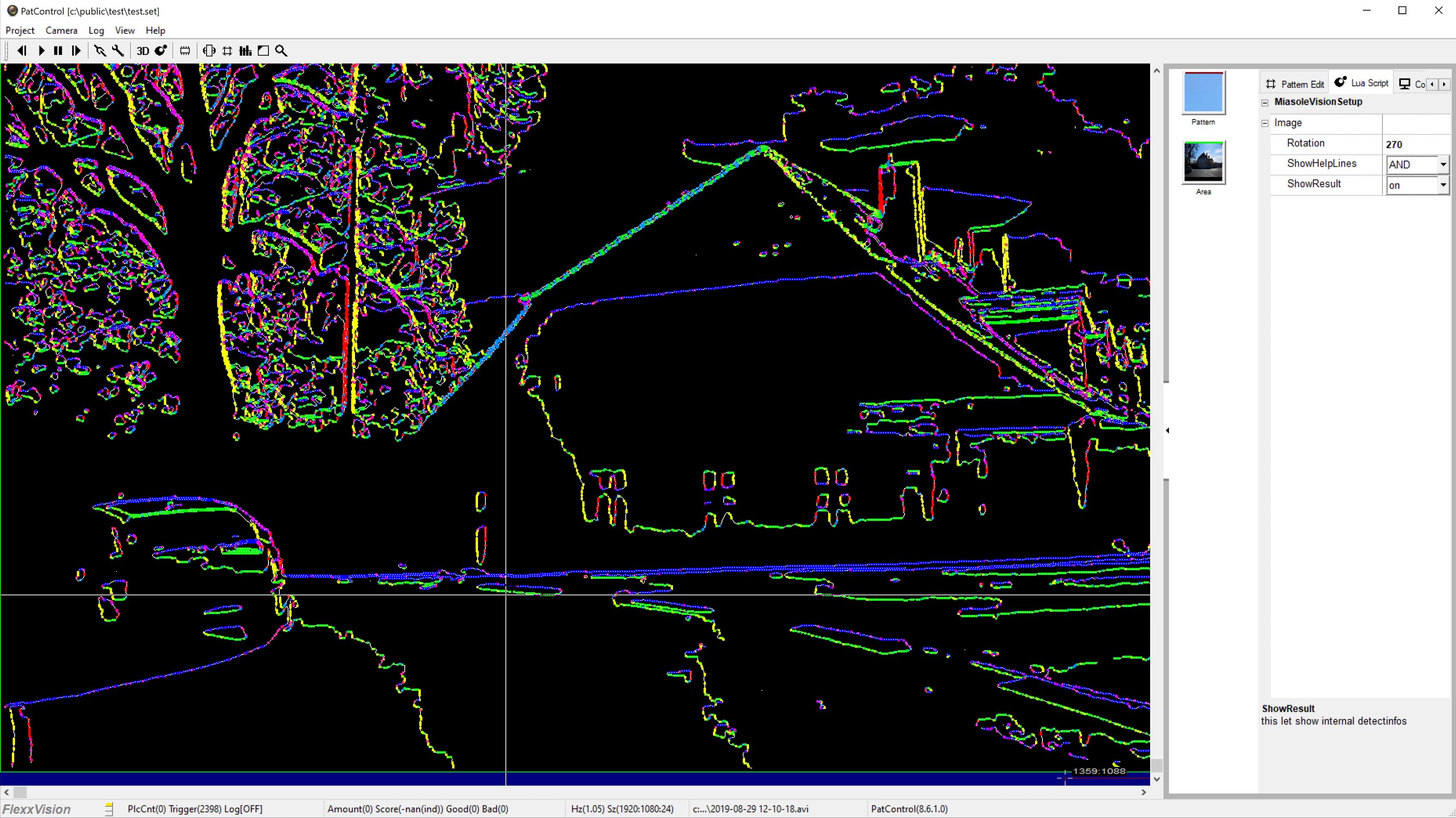
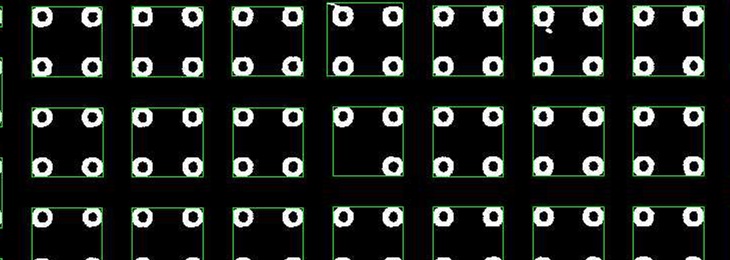
PatControl verfügt über Pixelsensoren, die über die integrierte Scriptsprache Lua ausgelöst werden. Jedes Script ist mit einem Prüfplan verbunden, der sich von der Prozesssteuerung beliebig laden lässt, z.B. Rotationsprüfpläne.
Jeder Trigger an der Kamera löst Events an das jeweilige Script aus, das nun die vorhandenen Pixelsenoren anstößt, genau so, wie es die Objekterkennung für Ihrer Teile benötigt.
Lua bekommt vom Prüfplan benutzerdefinierbare Parameter in Form von Events. Mit diesen ist es möglich, noch während der Laufzeit der Maschine ggfl. Position und Art der Sensoren zu verändern. Auch diese Parameter kann Lua nachführen,z.B. aufgrund von Trends der Messungen oder über den Stichprobenumfang.
(Dynamic -SPC "StatisticProcessControl")
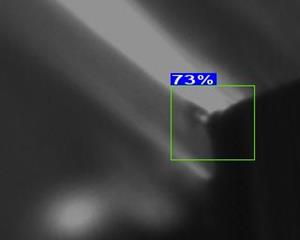
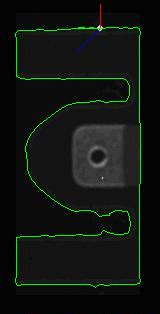
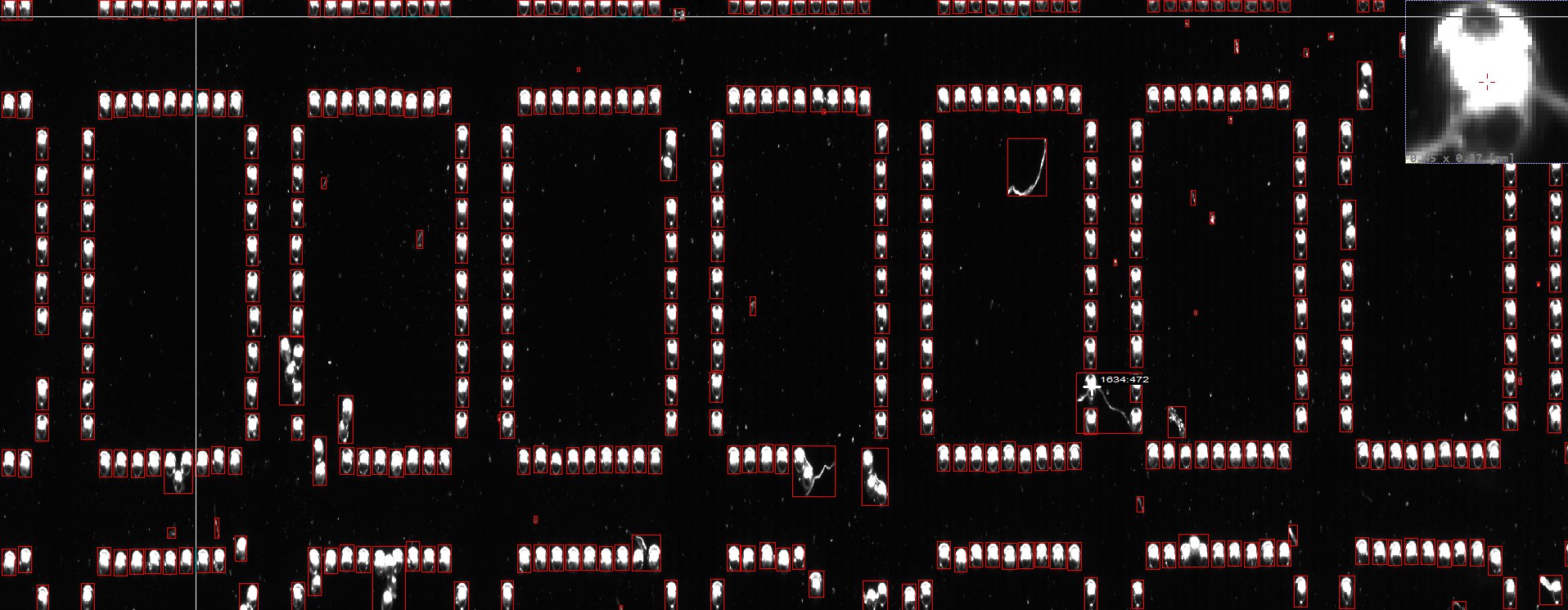
Die Sensorergebnisse (PatResults) können als gesamtes Prozessergebnis auf der Oberfläche von PatControl als Rechtecke,Kreise,Dreiecke und Texte Dargestellt werden, sowie Datenübertragungen und Schaltzustände auslösen.




")